
Ngwa akwa akwa akwụkwọ
Ụlọ ahịa ngwá ọrụ akpaka na-eji POROVIN nkenke gia RV na AR series servo actuators maka mgbanwe ngwá ọrụ akpaka nke ọma. Ọ nwere ike zute mgbanwe akpaaka nke ihe ruru ụdị 150 nke ngwaọrụ taper ogo 50.
Nkọwapụta ụlọ ọrụ
Ụlọ ahịa ngwá ọrụ bụ ngwaọrụ nke na-enye ihe nchekwa ngwá ọrụ na mkpa ngbanwe na nhazi nhazi akpaaka, na usoro mgbanwe ngwá ọrụ na-akpaghị aka na ụlọ ahịa ngwá ọrụ nwere ike ịchekwa ọtụtụ ngwaọrụ. Mgbe ahụ, na esịtidem mejupụtara enweghị ike kewapụ ike nkwado nke reducer, Proway si elu-nkenke planetary reducer usoro na-etinyere na mma n'ọbá akwụkwọ ígwè, nkenke planetary reducer obere size, elu ziri ezi, n'ihi na mmepe nke mmepụta na-enye nnukwu nnyefe. ike.

AGV robot

Onye na-ebu

Ntugharị akwụkwọ mposi
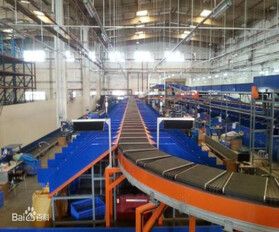
Igwe nkwakọba akwụkwọ mposi
Uru Ngwa
POROVIN ziri ezi ebelata uru
1, akpaka ngwá ọrụ ụlọ ahịa reducer, elu nnyefe torque
2, akpaka ngwá ọrụ ọba akwụkwọ pụrụ iche planetary reducer, ala ntinye inertia elu
3, akpaka ngwá ọrụ ọba akwụkwọ akụrụngwa na reducer, torsion na tụgharịa isi ike
4, obere ịma jijiji
5, ikike ibufe oke (ihe mberede braking torque)
6. Obere nha
7. Mbelata nke otu-ogbo nwere nnukwu ọsọ ọsọ
8. Nlekọta n'efu
Uru nke igwe
1, nnukwu ngwá ọrụ ike, ngwa ngwa mgbanwe ọsọ ọsọ
2, ikike ngwá ọrụ dị ukwuu, mee ka nhazi ahụ dị mfe, belata nha, mgbakọ dị mfe
3, nwere ike na-eme ngwa ngwa breeki, mmepụta nke ọma
4, nwere ike rụọ ọrụ ngwa ngwa ngwa ngwa
5. Ọrụ dị nro na nke dị jụụ
6, mmetụta na-eguzogide, elu ntụkwasị obi
7, ihe ejikọtara ọnụ, belata ọnwụ ike
8, enweghị ụgwọ mmezi ọzọ
Zute ihe achọrọ
Ụlọ ahịa ngwá ọrụ akpaka na-eji POROVIN nkenke gia RV na AR series servo actuators maka mgbanwe ngwá ọrụ akpaka nke ọma. Ọ nwere ike zute mgbanwe akpaaka nke ihe ruru ụdị 150 nke ngwaọrụ taper ogo 50.
● Ọsọ dị elu - Ọdịdị nke agbụ ruo 100 ft / min
● Ntinye sprocket dị mfe
● Ndokwa n'usoro -- AR usoro actuators enweghị ngwụcha multi ntụgharị ntụgharị -- AR usoro actuators.
Ngwaahịa akwadoro
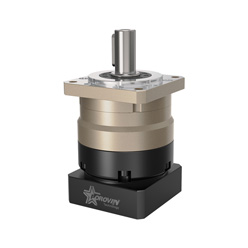
Nkenke helical planetary reducer -TFG usoro

Elu nkenke helical planetary reducer -TNE usoro

Elu nkenke helical planetary reducer -TNF usoro







